Servo motor DC de precisão 46S/12V-8A1

Recursos básicos do servo motor DC: (outros modelos, o desempenho pode ser personalizado)
| 1. Tensão nominal: | 12V CC | 5. Velocidade nominal: | ≥ 2.600 rpm |
| 2. faixa de tensão operacional: | CC 7,4 V-13 V | 6. corrente de bloqueio: | ≤2,5A |
| 3. potência nominal: | 25W | 7. corrente de carga: | ≥1A |
| 4. direção de rotação: | O eixo de saída CW está acima | 8. Folga do eixo: | ≤1,0 mm |
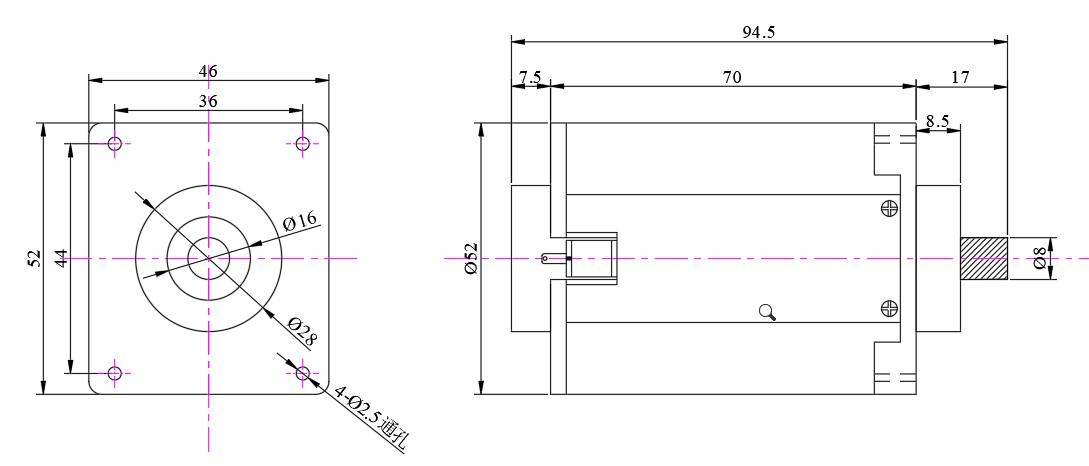
Diagrama de aparência do produto
Tempo de expiração
Desde a data de produção, o período de uso seguro do produto é de 10 anos e o tempo de trabalho contínuo é ≥ 2.000 horas.
Recursos do produto
1.Design compacto e que economiza espaço;
2.Estrutura de rolamento de esferas;
3. Longa vida útil da escova;
4.O acesso externo às escovas permite fácil substituição para prolongar ainda mais a vida útil do motor;
5. Alto torque de partida;
6. Frenagem dinâmica para parar mais rápido;
7.Rotação reversível;
8. Conexão simples de dois fios;
9. Isolamento classe F, comutador de soldagem de alta temperatura.
10.Com baixo ruído e operação estável, é especialmente adequado para ocasiões que exigem alta velocidade e baixo ruído.
Aplicativos
É amplamente utilizado nas áreas de casa inteligente, dispositivos médicos de precisão, direção de automóveis, produtos eletrônicos de consumo, equipamentos de massagem e saúde, ferramentas de cuidados pessoais, transmissão inteligente de robôs, automação industrial, equipamentos mecânicos automáticos, produtos digitais, etc.
Ilustração de desempenho



Quais são as características do servo motor DC
Em um servo motor DC existe uma corrente contínua (DC) com terminais positivos e negativos. Entre cada um desses terminais, a corrente flui exatamente na mesma direção. A inércia do servo motor deve ser menor para precisão e exatidão. Os servos DC têm resposta rápida, o que é conseguido mantendo uma alta relação torque-peso. Além disso, a característica de velocidade do servo DC deve ser linear.
Com um servo motor CC, o controle da corrente é muito mais simples do que com um servo motor CA porque o único requisito de controle é a magnitude da corrente da armadura. A velocidade do motor é controlada pela modulação por largura de pulso controlada pelo ciclo de trabalho (PWM). O fluxo de controle é usado para gerenciar o torque, resultando em consistência confiável ao longo de cada ciclo de atividade.
Os servomotores CC tendem a ter maior inércia do que os motores CA tipo gaiola de esquilo. Isto e o aumento da resistência ao atrito das escovas são os principais fatores que impedem seu uso em servos de instrumentos. Em tamanhos pequenos, os servomotores CC são usados principalmente em sistemas de controle de aeronaves onde restrições de peso e espaço exigem que o motor forneça potência máxima por unidade de volume. Eles são normalmente usados para serviço intermitente ou onde é necessário um torque de partida excepcionalmente alto. Os servomotores CC também podem ser usados em atuadores eletromecânicos, controladores de processo, equipamentos de programação, robôs de automação industrial, equipamentos de máquinas-ferramenta CNC e muitas outras aplicações de natureza semelhante.
Um servo motor DC é um conjunto que consiste em quatro componentes principais, nomeadamente um motor DC, um dispositivo sensor de posição, um conjunto de engrenagens e um circuito de controle. A velocidade necessária de um motor DC depende da tensão aplicada. Para controlar a velocidade do motor, o potenciômetro produz uma tensão que é aplicada a uma das entradas do amplificador de erro.







