Motor Servo DC de Precisão 46S/12V-8C1

Recursos básicos do servo motor DC: (outros modelos, o desempenho pode ser personalizado)
| 1. Tensão nominal: | 12V CC | 5. Velocidade nominal: | ≥ 2.600 rpm |
| 2. faixa de tensão operacional: | CC 7,4 V-13 V | 6. corrente de bloqueio: | ≤2,5A |
| 3. potência nominal: | 25W | 7. corrente de carga: | ≥1A |
| 4. direção de rotação: | O eixo de saída CW está acima | 8. Folga do eixo: | ≤1,0 mm |
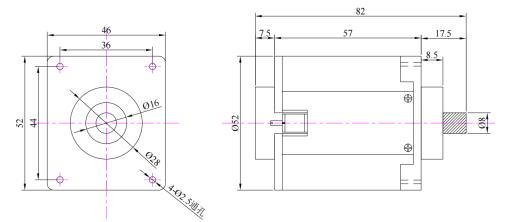
Diagrama de aparência do produto
Tempo de expiração
A partir da data de produção, o período de uso seguro é de 10 anos, tempo de trabalho contínuo ≥2.000 horas.
Recursos do produto
1. Design compacto e que economiza espaço;
2. Estrutura de rolamento de esferas;
3, escova longa vida útil;
4, o acesso externo da escova permite fácil substituição, podendo prolongar ainda mais a vida útil do motor;
5. Alto torque de partida;
6, pode realizar frenagem dinâmica para parar mais rápido;
7. Rotação reversível;
8. Conexão simples de dois fios;
9, isolamento de grau F, usando comutador de soldagem de alta temperatura.
Aplicativos
É amplamente utilizado em casa inteligente, equipamentos médicos de precisão, campo de condução de automóveis, séries de produtos eletrônicos de consumo, equipamentos de massagem de saúde, ferramentas de cuidados pessoais, transmissão inteligente de robôs, automação industrial, equipamentos mecânicos automáticos, produtos digitais e outros campos.
Princípio de funcionamento do servo motor
Contanto que o servo dependa do pulso para posicionar, basicamente pode ser entendido desta forma, o servo motor recebe um pulso, ele irá girar o ângulo correspondente de um pulso, de modo a obter o deslocamento. Como o próprio servo motor tem a função de enviar pulsos, o número correspondente de pulsos será enviado para cada ângulo de rotação do servo motor. Desta forma, o pulso recebido pelo servo motor é ecoado, ou denominado circuito fechado. Desta forma, o sistema saberá quantos pulsos são enviados ao servo motor, e quantos pulsos são recebidos de volta, para que possa ser um controle muito preciso da rotação do motor, de modo a obter um posicionamento preciso, podendo chegar a 0,001mm .
Ilustração de desempenho










